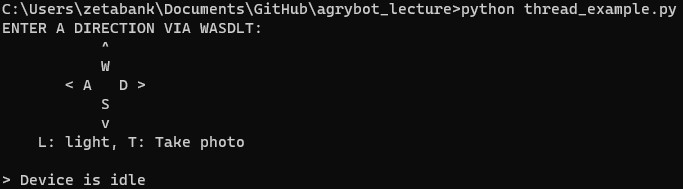
Thread Examples
Import the necessary python libraries and modules.
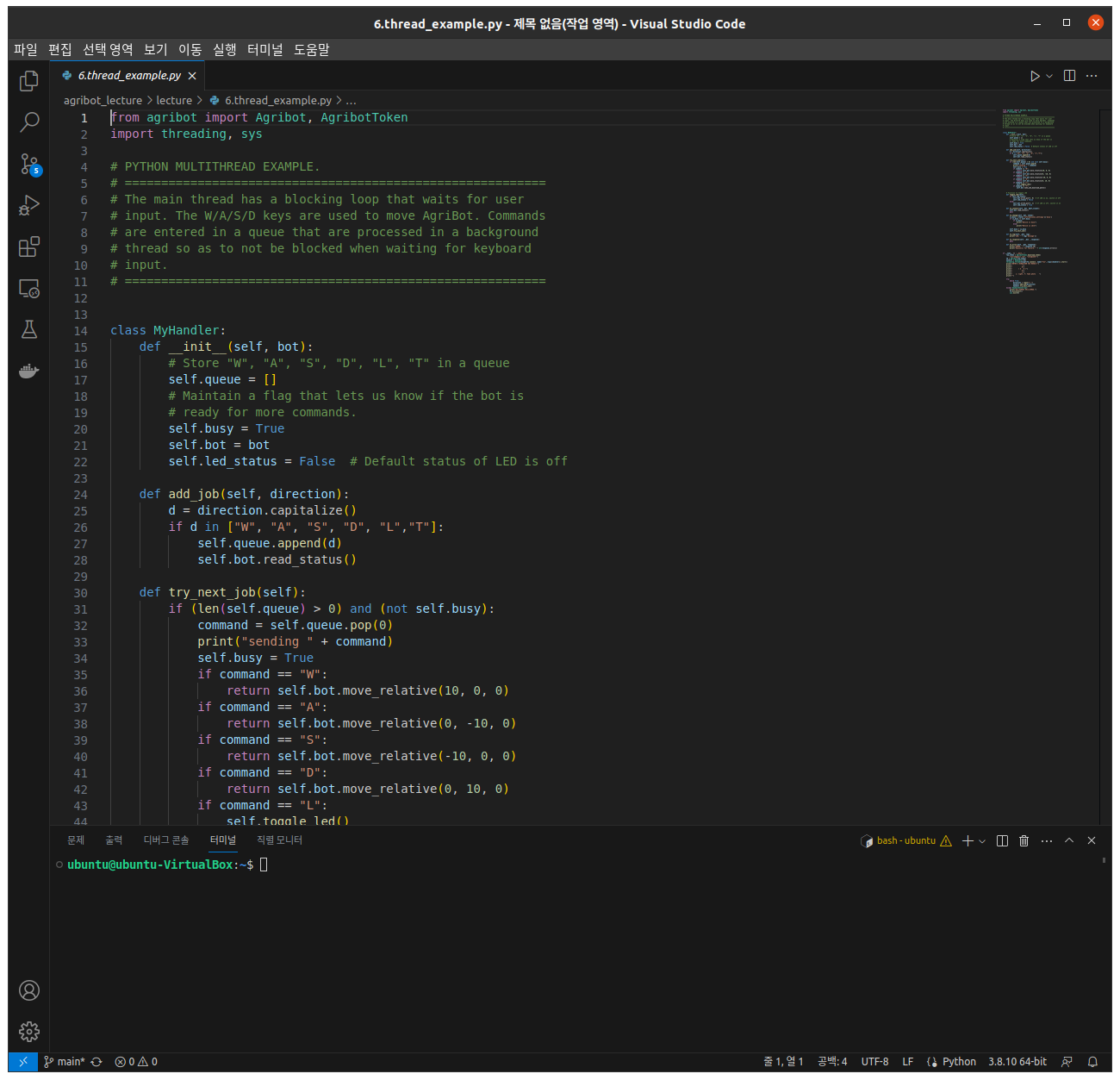
from agribot import Agribot, AgribotToken
import threading, sys
Define a custom handler, CustomHandler, with methods:
add_job: Add the next process.
try_next_job: Run the following process.
class MyHandler:
def __init__(self, bot):
# Store "W", "A", "S", "D", "L", "T" in a queue
self.queue = []
# Maintain a flag that lets us know if the bot is
# ready for more commands.
self.busy = True
self.bot = bot
self.led_status = False # Default status of LED is off
def add_job(self, direction):
d = direction.capitalize()
if d in ["W", "A", "S", "D", "L","T"]:
self.queue.append(d)
self.bot.read_status()
def try_next_job(self):
if (len(self.queue) > 0) and (not self.busy):
command = self.queue.pop(0)
print("sending " + command)
self.busy = True
if command == "W":
return self.bot.move_relative(10, 0, 0)
if command == "A":
return self.bot.move_relative(0, -10, 0)
if command == "S":
return self.bot.move_relative(-10, 0, 0)
if command == "D":
return self.bot.move_relative(0, 10, 0)
if command == "L":
self.toggle_led()
if command == "T":
self.bot.take_and_download_photo()
# Function to toggle LED
def toggle_led(self):
if self.led_status:
self.bot.write_pin(7, 0) # If LED is on, switch it off
self.led_status = False
else:
self.bot.write_pin(7, 1) # If LED is off, switch it on
self.led_status = True
def on_connect(self, bot, mqtt_client):
self.bot.read_status()
pass
def on_change(self, bot, state):
is_busy = state['informational_settings']['busy']
if is_busy != self.busy:
if is_busy:
print("Device is busy")
else:
print("Device is idle")
self.busy = is_busy
self.try_next_job()
def on_log(self, _bot, log):
print("LOG: " + log['message'])
def on_response(self, _bot, _response):
pass
def on_error(self, _bot, response):
print("ERROR: " + response.id)
print("Reason(s) for failure: " + str(response.errors))
Connect the Agribot instance with the CustomHandler instance, resulting in the execution of the defined methods on respective triggers.